Az elektronikai ipar erőteljes fejlődésével egyes szerkezeti elemek helyzetérzékelése lassan átváltozik az eredeti érintkezési mérésről az érintésmentes mérésre.Hall helyzetérzékelő és mágnes. Hogyan választhatunk megfelelő mágnest termékeinknek és szerkezetünknek megfelelően? Itt néhány egyszerű elemzést végzünk.
Először is meg kell határoznunk a mágnes anyagát. Jelenleg a szamárium kobalt mágnest és a neodímium vasbórt széles körben használják a csarnok helyzetérzékelőjében. A fő különbség a két mágnes között az, hogy azonos térfogatú NdFeB mágnesek erősebbek, mint a szamárium kobalt mágnesek; a szamáriumi kobalt termikus kimozdulása kisebb, mint az Nd-Fe-B-é; a szamárium-kobalt oxidációs ellenállása erősebb, mint az Nd-Fe-B-é, de általában van egy bevonat a mágnes külső oldalán, ami megoldhatja az oxidáció problémáját; a szamárium-kobaltmágnes jobb hőmérséklet-ellenállással rendelkezik, mint az NdFeB mágnes, de mindkét mágneses anyag hőmérsékleti ellenállása elérheti a 200 ℃-ot. Ezért a mágnes típusának kiválasztásakor azt a költségteljesítmény, az üzemi hőmérséklet és a munkakörnyezet figyelembevételével kell értékelnünk. Általánosságban elmondható, hogy az NdFeB-t többet lehet használni, főleg azért, mert ez rendelkezik a legjobb mágneses térjellemzőkkel. Széles hőmérsékleti tartományban történő munkavégzés esetén azonban javasolt a szamárium-kobaltmágnes választása a kis hőeltolódás miatt.
Ezenkívül meg kell határoznunk a mágnes néhány alapvető paraméterét. A vizsgálati pozíció információi és a tárgy mozgási iránya alapján meghatározzuk, hogy a mágnes mágnesezési iránya diametrális vagy axiális. Ezenkívül meghatározzák, hogy ki kell-e választani anégyzet alakú mágnesvagy ahengeres mágnesa beépítési struktúra szerint. Természetesen néha a szerkezetnek megfelelően testre kell szabnunk a mágnes alakját. A mágneses fluxussal kapcsolatban van egy másik követelmény, amely mindig is gondunk volt a mágnes kiválasztásánál. Valójában a következő két szempontból kell elemeznünk:
1. A Hall pozíció érzékelő által kiváltott mágneses térerősség és az indukált mágneses tér tartománya minden irányban jól látható lesz az érzékelő adatkönyvében.
2. A mágnes és az érzékelő közötti távolságot általában a termék szerkezete határozza meg. A fenti két szempont és példaként az alábbi ábrán látható mágneses tér változási görbe alapján tudjuk meghatározni a szükséges mágnes mágneses térerősségét.
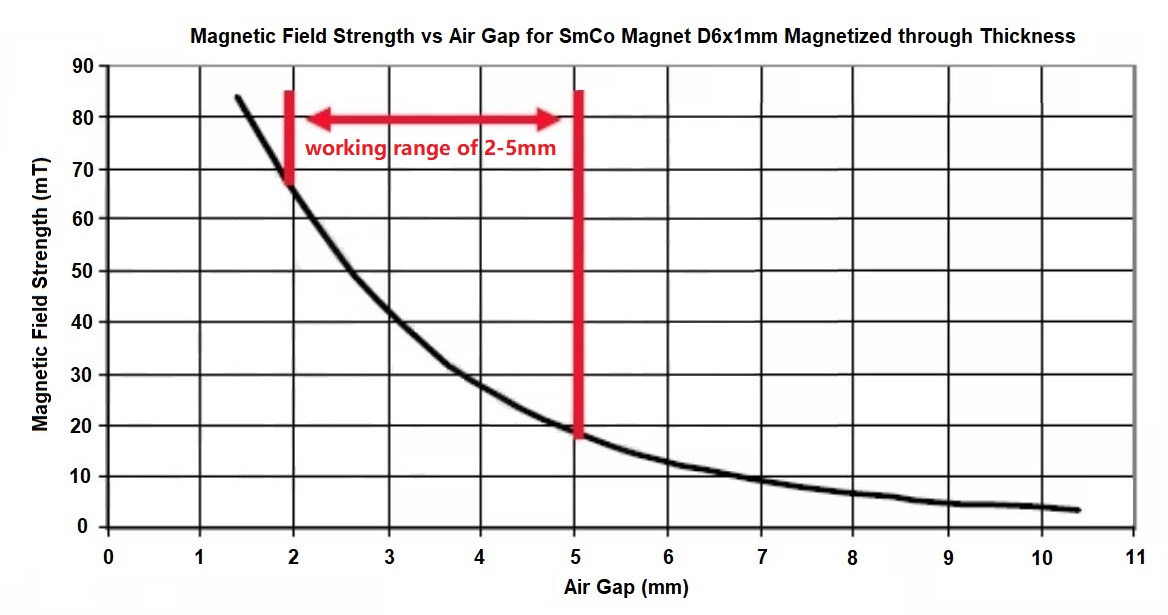
Végül meg kell értenünk, hogy ez nem jelenti azt, hogy amíg a mágneses tér az érzékelő tartományigényére esik, addig a mágnes olyan távol lehet az érzékelőtől. Bár magának az érzékelőnek van kalibrációs funkciója, meg kell értenünk, hogy ha a mágnes túl messze van az érzékelőtől, akkor magának a mágneses térnek az eloszlását nehéz biztosítani a linearitás vagy a linearitás közelsége érdekében. Ez azt jelenti, hogy a helyzet változásával és magának a mágneses térnek a nemlineáris eloszlásával az érzékelő mérése bonyolulttá, a kalibráció pedig nagyon bonyolulttá válik, így a szorzat nem rendelkezik redukálhatósággal.
A fenti csak a mágnes kiválasztásának egyszerű elemzése a Hall-érzékelő alkalmazásokban. Reméljük, hogy hasznos lesz az Ön számára. Ha további kérdése van a fejlesztési folyamat során, kérjük, lépjen kapcsolatba velünk,Ningbo Horizon Magnetics. További kommunikációt és technikai támogatást tudunk biztosítani.
Feladás időpontja: 2021. augusztus 12